

 INTERRUPTIONS
INTERRUPTIONS3/7
INTERRUPTIONS

Au départ j'avais quelques codes semblant fonctionner sur attiny85. J'ai tenté avec quelques difficultés de transposer ces codes sur un attiny84 sans une réussite totale. Mais mon but au final était de faire fonctionner des interruptions sur attiny861 sur n'importe quelle broche et là, je me suis cassé les dents. J'ai donc décidé de remettre l'ouvrage sur le métier. Donc après avoir décidé de la méthode à suivre, j'ai commencé par créer un référentiel puis, a débuté le travail sur l'ATTINY85.
Cet article va décrire l'utilisation des interruptions sur la puce attiny85. Trois exemples avec 2 boutons poussoirs :
- le premier en mode ON/OFF.
- le second en mode ON/OFF avec détection du Front Montant et Descendant.
- le troisième avec un mode interrupteur Marche / Arrêt.
Le code est abondamment commenté.
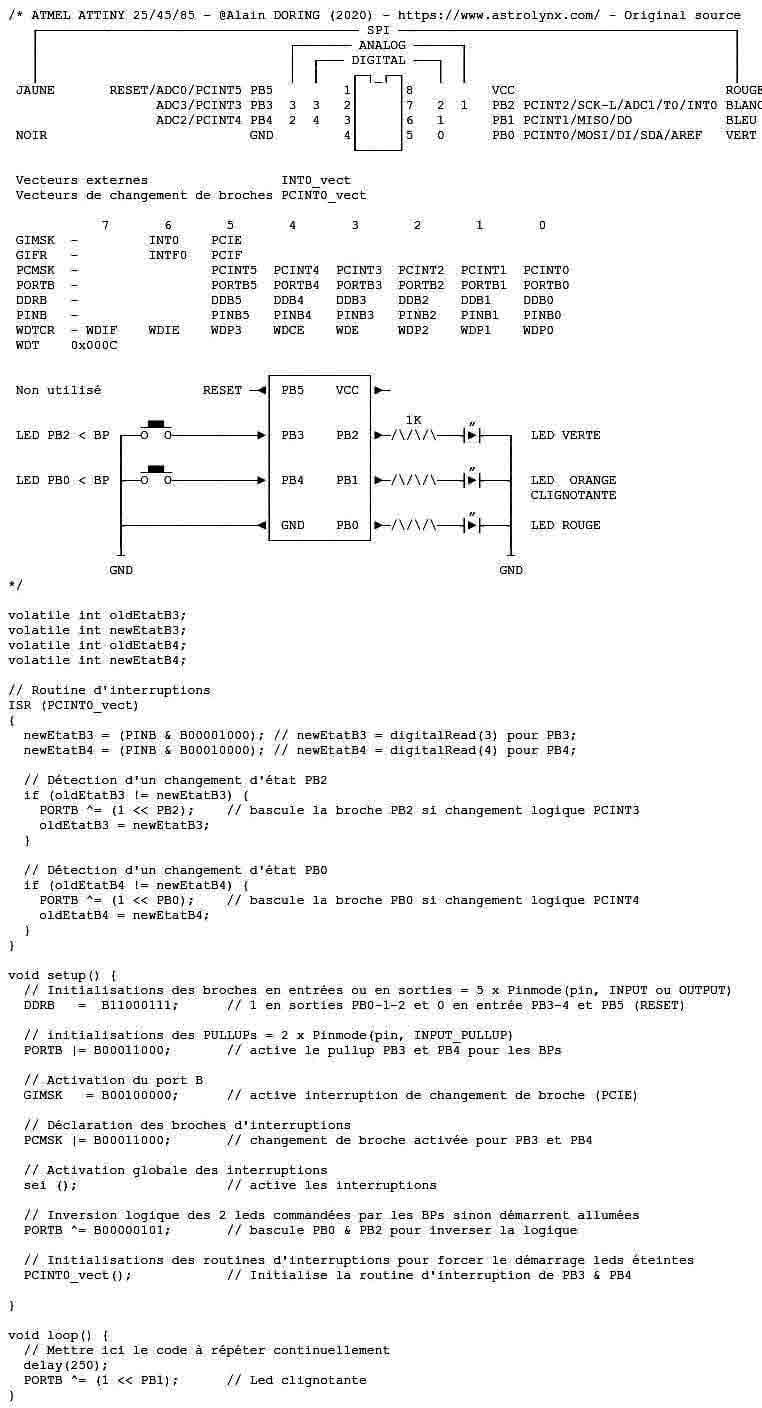
L'entête est composé de :
1) Le brochage du microcontrôleur utilisé.
- SPI indiquant la couleur pour brancher le câble de programmation.
- ANALOG les numéros de broches analogiques.
- DIGITAL les numéros de broches digitales.
2) Les vecteurs d'interruptions.
3) Les registres d'états et de contrôle.
4) Schéma de branchement du microcontrôleur avec les autres composants.
Suivi ensuite par le code à proprement parler.
- Déclarations des bibliothèques #include, si nécessaires (j'ai fait en sorte de ne pas en utiliser dans mes exemples).
- Déclarations des variables, si nécessaires.
- Définition des variables volatiles qui serviront dans la ou les routines d'interruption.
- Routine(s) d'interruption(s).
- Setup où les broches sont définies et initialisées.
- Loop où le programme principal boucle en permanence.
Téléchargement du code au bas de cette page
Sur la première ligne de code du setup, le commentaire d'entrée explique bien la façon d'utiliser ce genre de programmation et son avantage principal.
DDRB = B11000111; // 1 en sorties PB0-1-2 et 0 en entrée PB3-4
Cette ligne de code remplace, à elle seule, 5 lignes de code (dans cette puce, il y a 6 broches programmables).
La broche RESET est programmable mais on évitera de le faire.
Elle serait remplacée par :
// initialisation des broches = pinMode(pin, INPUT ou OUTPUT) pinMode(0, OUTPUT); // PB0 pinMode(1, OUTPUT); // PB1 pinMode(2, OUTPUT); // PB2 pinMode(3, INPUT); // PB3 pinMode(4, INPUT); // PB4
DDRB (Data Direction Register port B). Le B de B11000111 désigne un nombre binaire dont les bits indiquent la direction de la broche (0 pour entrée ou 1 pour sortie). Les bits vont de 0 à 7 en partant de la droite vers la gauche. DDRB se voit affecté par le signe = de la valeur de droite B11000111. Donc les broches PB0, PB1 et PB2 sont affectées en sorties pour allumer les leds et les broches PB3 et PB4 en entrées pour recevoir les ordres des boutons poussoirs.
L'exemple en pinMode indique les pins de 0 à 4 donc les cinq broches réellement utilisées. Dans ce cas, la sixième broche (broche digitale 5 - PB5) étant le RESET n'est pas utilisée donc pas programmée. Par contre, elle est mise à 0 dans DDRB parce qu'il faut mettre 0 ou 1.
Les bits 6 et 7 (ceux de gauche) sont mis à 1.
ATTENTION ! Dans les "pinMode()" ci-dessus, j'ai utilisé les numéros de broches digitales qui, pour l'ATTiny85, correspondent au numéros des bits du port B ... Commentés sur chaque ligne.CE N'EST PAS TOUJOURS LE CAS. Si c'est possible, utilisez toujours PB0 ... PB7 pour le PORTB. Suivant les puces utilisées, vous trouverez le(s) PORTA, PORTB, PORTC, PORTD et donc, PAx, PBx, PCx, PDx.
Dans le code ci-dessus, à chaque appui ou relâchement du bouton poussoir, il se produit une interruption qui active une simple bascule OFF/ON, ON/OFF dans l'ISR. Ici je vous propose de détecter le niveau HAUT ou BAS de la broche, pour avoir la possibilité de mesurer la durée d'impulsion entre l'appui et le relâchement du bouton poussoir ou tout autre capteur. ATTENTION ! Il est conseillé de faire des routines ISR les plus courtes possible et éviter certaines opérations trop longues. Dans ce cas, le plus simple est de charger une variable avec Millis(). Exemple Monte = Millis() et Descend = Millis(). Le traitement se faisant dans la boucle loop.
Remarque : Dans ce code, le front montant est noté avant la montée, il peut bien entendu être déclaré après. A l'inverse, le front descendant est noté après la descente et, il peut également être déclaré avant. Cela est à votre seule appréciation. Les temps de montée et de descente me sont inconnus mais ils doivent être très courts. Sachant qu'un cycle à 8mHz est égal 1 / 8000000 donc 0,125µs, ils doivent être inférieur à la microseconde, sauf erreur de ma part. Tout ceci n'étant que théorique, si vous aviez une réponse plus fiable à me proposer, je me ferai un plaisir de répercuter votre information (cliquez sur le petit bonhomme qui s'agite au bas à droite de la page d'accueil). Le code contient la mise en mémoire DM, FM, DD et FD mais je n'ai pas encore pu tester le retour car l'affichage sur la console série ne fnctionne pas. A l'avenir, je tenterai un montage avec un afficheur I2C.
Ci-dessous, la routine d'interruption (ISR) modifiée.
// variables à déclarer
volatile unsigned long DM, FM, DD, FD;
// Routine d'interruptions
ISR (PCINT0_vect)
{
newEtatB3 = (PINB & B00001000); // newEtatB3 = digitalRead(3) pour PB3;
newEtatB4 = (PINB & B00010000); // newEtatB4 = digitalRead(4) pour PB4;
// Détection d'un changement d'état PB3
if (oldEtatB3 != newEtatB3) {
if (newEtatB3 == 1) {
// Début du front montant pour PB3 ici
DM = micros();
PORTB ^= (1 << PB2); // bascule la broche PB2 si changement logique PB3
// Fin du front montant pour PB3 ici
FM = micros();
}
else {
// Début du front descendant pour PB3 ici
DD = micros();
PORTB ^= (1 << PB2); // bascule la broche PB2 si changement logique PB3
// Fin du front descendant pour PB3 ici
FD = micros();
}
oldEtatB3 = newEtatB3;
}
// Détection d'un changement d'état PB4
if (oldEtatB4 != newEtatB4) {
if (newEtatB4 == 1) {
// Insérez le traitement du front montant pour PB4 ici
PORTB ^= (1 << PB0); // bascule la broche PB0 si changement logique PB4
}
else {
PORTB ^= (1 << PB0); // bascule la broche PB0 si changement logique PB4
// Insérez le traitement du front descendant pour PB4 ici
}
oldEtatB4 = newEtatB4;
}
}
Téléchargement du code au bas de cette page
A noter : La désactivation de l'inversion logique des 2 leds dans le setup. Voir lignes ci-dessous.
// Inversion logique des 2 leds commandées par les BPs sinon démarrent allumées // PORTB ^= B00000101; // bascule PB0 & PB2 pour inverser la logique
Ci-dessous la routine ISR.
// Routine d'interruptions
ISR (PCINT0_vect)
{
newEtatB3 = (PINB & B00001000); // newEtatB3 = digitalRead(3) pour PB3;
newEtatB4 = (PINB & B00010000); // newEtatB4 = digitalRead(4) pour PB4;
// Détection d'un changement d'état PB3
if (!newEtatB3 || newEtatB3) {
if (!newEtatB3) {
PORTB ^= (1 << PB2); // bascule la broche PB2 si changement logique PB3
}
}
// Détection d'un changement d'état PB4
if (!newEtatB4 || newEtatB4) {
if (!newEtatB4) {
PORTB ^= (1 << PB0); // bascule la broche PB0 si changement logique PB4
}
}
}
Téléchargement du code au bas de cette page
Que faire de tout ceci ? Au-delà du simple calcul, on peut commander des actions en utilisant des transistors, des mosfets, des ULN 2003 ou des relais. Exemple : télécommande ou programmation d'éclairage, simulateur de présence, réveil du circuit par une action avec envoi de données, etc..., etc..., la seule limite étant l'imagination de chacun.
L'utilisation des interruptions n'est pas systématique. Pour vous lancer dans la programmation des interruptions, il faut être rigoureux, très attentif et ne pas être borné. Le téléversement s'est bien passé mais le montage ne fonctionne pas correctement, ou pas du tout. Première chose, vérifier son câblage et la tension d'alimentation. J'insiste sur cette vérification, le diable se cache dans les détails, un câble présent mais branché sur la patte juste à côté, un petit strap de masse oublié. Ah! Et sur les grandes platines d'essai, n'oubliez pas de ponter les liaisons GND et VCC de chaque côté au milieu, si cela est nécessaire. Parfois on a beau regardé, on ne voit rien. Allez faire autre chose puis, remettez l'ouvrage sur le métier.
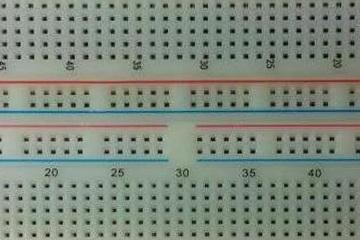
La platine du bas nécessite des pontages
pour assurer la continuité des pistes VCC et GND.
Celle du haut n'en a pas besoin.
Le matos et le câblage ça va !... on vérifie son programme, des erreurs ne sont pas forcément indiquées. un exemple : un simple if (x = 1) {} ne se mettra pas en erreur ( ouais ben ce n'est pas = mais == ). Des erreurs comme celle-ci, il y en a d'autres, cherchez sur le net, vous trouverez. Tout s'est bien passé, je vous souhaite bon courage pour la suite et de nombreuses interruptions ... sur ATTINY. Dernière recommandation, prenez garde de ne pas vous tromper dans les lignes de programmation contenant des codes binaires. Cela ne pardonne pas.
Vous avez du mal à vous en sortir, je vous conseille la lecture du site LOCODUINO
Ou la version original de Nick GAMMON (en anglais) que vous pouvez bien entendu, passer en traduction dans votre navigateur préféré.
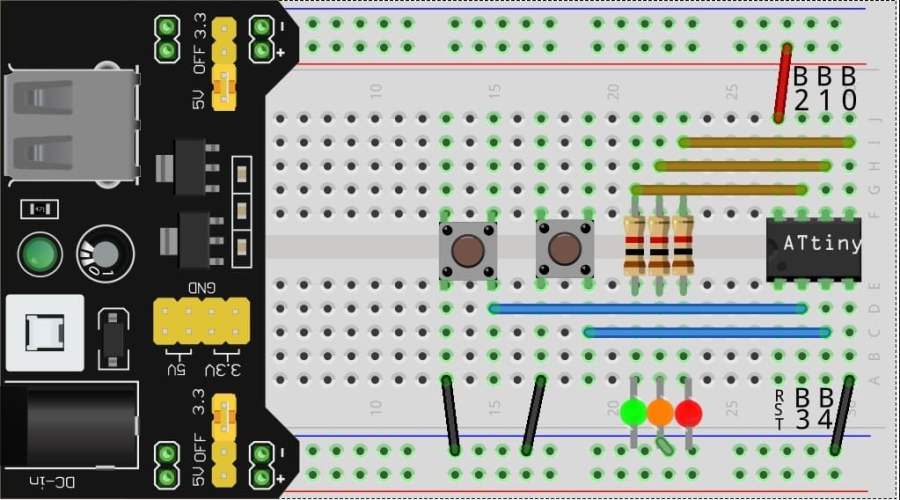
Si vous reproduisez l'implantation suivante sur une breadboard et utilisez le bon code en téléchargement, alors tout devrait fonctionner, sinon appliquez les recommandations ci-dessus. Lorsque vous aurez compris le mode de programmation, il sera facile de transposer le code sur d'autres puces en tenant compte des spécificités de chacune d'entre-elles. En plus de l'ATTINY85, les pages suivantes décrivent les adaptations pour les puces ATTINY84, ATTINY861, ATTINY88 ce qui vous donne respectivement 5, 11, 15, 23 broches exploitables (exit les broches d'alimentation et RESET). Dans les exemples décrits, suivant les puces, 1 à 3 broches sont utilisées pour les faire clignoter. Elles sont volontairement choisies, par port différent et/ou avec la broche INT0 pour vérifier le fonctionnement des interruptions par changement de broches. Pour le reste chaque bouton poussoir est attaché à une led afin d'en vérifier le fonctionnement. Il est bien entendu possible d'utiliser la totalité des broches - une en interruptions (4, 10, 14, 22 broches), et avec la broche laissée en sortie, communiquer par un code avec une autre puce pour actionner ce que l'on veut. Maintenant à vous d'imaginer ce que vous pourriez en faire.
A NOTER :
Les codes n'utilisent aucune librairie sauf à ajouter un complément de code nécessitant une ou plusieurs librairies.
Voilà ! Je m'excuse pour cette introduction un peu longue mais les connaisseurs liront en diagonale. Pour un débutant ou ceux qui n'ont aucune connaissance sur les interruptions, je leur conseille de lire attentivement ces premières pages avant d'entamer les pages suivantes, à savoir, ATTINY84, ATTINY861 et ATTINY88.
Cette vue permet de voir l'implantation des composants sur une breadboard. Les annotations B0..B4 sont à lire PB0..4. La broche PB5, notée RST pour RESET, n'est pas utilisée.
Cette vidéo décrit le processus après chargement du code dans l'IDE. Le choix de la puce (suivant le code chargé), la connexion de la puce. La description de la structure des codes. Le téléversement et la démonstration du code.
Cette vidéo montre le fonctionnement des interruptions sur un ATTiny85.
La led verte PB2 commandée par le bouton poussoir PB3.
La led rouge PB0 commandée par le bouton poussoir PB4.
La led orange PB1 dont le clignotement est assuré dans la boucle LOOP.
Télécharger les codes Interrupt_ATTiny85
Dans le code les opérations se font bit à bit.
! NON logique !0 !1 = 1 = 0 -> bit inversé & ET logique X 0 1 0 1 & 0 0 1 1 = 0 0 0 1 Pour exprimer X = X & 0 on utilise plutôt l'écriture suivante : X &= 0 -> force le bit à 0 X &= 1 -> valide le bit à 1 si et seulement si X=1 | OU logique X 0 1 0 1 | 0 0 1 1 = 0 1 1 1 X |= 1 -> force le bit à 1 X |= 0 -> bit inchangé ^ OU EXCLUSIF X 0 1 0 1 ^ 0 0 1 1 = 0 1 1 0 X ^= 1 -> force le changement d'état X ^= 0 -> bit inchangé