
 HEXALYNX
HEXALYNX
HEXALYNX
HEXALYNX
DESCRIPTION
Il y a longtemps, je regardais avec plaisir le CLEMENT Focuser sans pouvoir me l'offrir. Un superbe porte oculaire motorisable et d'une précision absolue.
Mais le temps de l'impression 3d étant arrivé, je me suis penché sur le problème. Sans prétendre à la même précision, loin de là, je me suis dit : « pourquoi ne pas tenter l'aventure ».
Une petite séance de Sketchup, une série d'impressions et hop ! Voilà le prototype en mains. Un étau à ventouse, quelques limes,
du papier de verre grade 120 à 800, et une série d'ajustages plus loin, je ne suis pas mécontent du projet, il a fière allure le PO.
Je ne vous cache pas qu'il faut une imprimante parfaitement réglée, les côtes sont à respecter sérieusement pour avoir un travail d'ajustage raisonnable.
Imprimez les bras en premier. Ajustez les bras de manière à ce qu'il s'ajuste grassement. Alésez les trous à l'aide d'un foret de Ø3mm.
J'ai utilisé du Stub de Ø3mm pour les axes de bras.
Limez ou poncez légèrement les emboitements jusqu'au moment où les bras manoeuvrent librement et sans jeu.
Imprimez le fût et les platines inférieure et supérieure.
Poncez le fût du grade 180 à 800 pour une super finition intérieure et extérieure. Pour l'intérieur, vérifiez le travail avec plusieurs oculaires 2 pouces
qui doivent coulisser librement sans jeu.
Poncez correctement la sortie étagée antireflets.
Poncez la platine supérieure et ajustez-y le fût. Contre-percez les trous des vis M4 de blocage avec un foret de Ø3mm, taraudez et montez les 2 vis moletées
de blocage.
Poncez la platine inférieure et ajustez là avec le fut. Celui-ci doit coulisser grassement sans dur.
Un moteur pas à pas, piloté par un ATTiny861, servira à manœuvrer le porte oculaire.
Moteur Pas à Pas 6 fils STH-39D165 (Nema 16) remplacé par 17HS4023.
Utilisation en pas entier. Vis M5 donc 0,004mm par pas.
Vitesse lente/moyenne/rapide (Entre pas 20ms/4ms/0,8ms). En mm/seconde = 0,2/1/5.
Monte et Baisse avec rattrapage de jeu dans le sens montant
et avance pas à pas par appui court dans les 2 sens.
Mémorisation de la Mise au point (utilisable uniquement dans la même configuration)
(d'où l'intérêt d'avoir des oculaires et instruments de capture parafocaux).
Rappel mémoire avec positionnement automatique.
Parcage du porte oculaire en position basse.
Butée Mini-Maxi.
Connexion ISP pour programmation in situ.
Démarrage avec homing - Mise à zéro - Lecture EEPROM - Positionnement oculaire automatique.
Utilisation de 8 boutons poussoirs avec des ponts diviseurs.
3 entrées du microcontrôleur suffisent pour le décodage.
Une pour la vitesse (3 boutons).
la seconde pour la mémorisation de la position, le rappel mémoire et le parcage (3 boutons).
la troisième pour actionner le monte et baisse (2 boutons).
Ajoutons à cela 2 fins de course (micro switch) utilisées en mode interruption sur 2 entrées.
En utilisant un attiny861, le nombre de broches permet le réglage des pas par programmation si nécessaire.
Ceci ne sera pas un problème car la prise ISP permettra de reprogrammer l'électronique sans démontage.
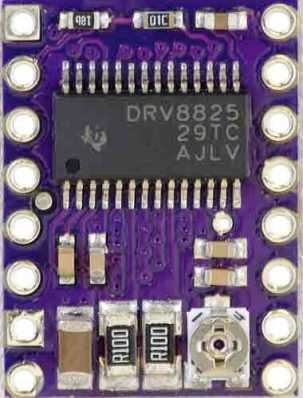
Je n'utilise pas cette possibilité ici car seul le pas entier est utilisé, ce qui laisse des broches disponibles pour d'autres développements si nécessaires. Il suffit de ne pas mettre les straps reliant les broches 7, 8 et 9 de l'ATTiny861 avec les broches M0, M1 et M2 du driver DRV8825.
Pour plus d'informations voir : le site POLOLU
Voir possibilité Intégration FWHM (Full-Width at Half-Maximum).
Le moteur pas à pas a été changé par la suite par un 17HS15-1704S (Nema 17).
En effet le moteur STH chauffait excessivement (+ de 50°). Ce nouveau moteur montait à 43°. Équipé d'un radiateur, il atteint 35° au bout d'une heure de fonctionnement pour se stabiliser par la suite à 37-38°. Ce qui est raisonnable pour un assemblage en plastique PLA. De plus, le porte oculaire sera principalement utilisé de nuit, donc la température ne sera pas un problème. En cas d'utilisation de jour, une petite protection avec une couverture de survie fera l'affaire.
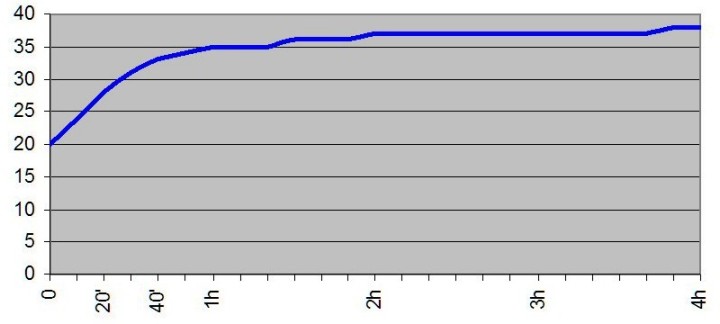
Montée en température du moteur
 |
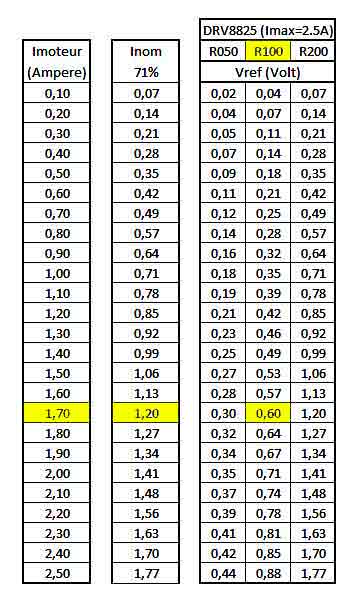 |
| Le DRV8825 | Les réglages utilisés |
Voir interfaçage pour intégration FWHM :
Interfaçage
Reste à développer un programme de capture avec visualisation et mesure du FWHM en automatique avec envoi des données par liaison série en utilisant la
prise ISP ou trouver un programme existant.
Des pistes : ?
- Envoyer et recevoir des données sur la voie série